Hello All.
I’m working on an RTS camera. The idea is, when you get closer to the ground (meaning, camera boor or arm spring, however you like to call it, is being reduced in size) the angle will be reduced as well. That way, it feels like you are really looking at a specific place rather than just getting the camera up closer to the ground.
In technical speaking, the shorter the Arm Spring length is, the smaller its angle with the ground.
I have an Arm Spring of 500-2500 units, and each wheel up/down change that value by 100.
Little math will produce that I have a delta of 2000 units, dived by 100, meaning I have 20 degrees total, that means, 1 degree per function call.
Now, when I changed the angle (in C++) it was very stiff and laggy. you could have sensed an immediate change, rather than a smooth one. So I turned to BPs to use the Time Line (before the C++ implementation of it), yet there was a problem.
Here is the Blueprint I made:
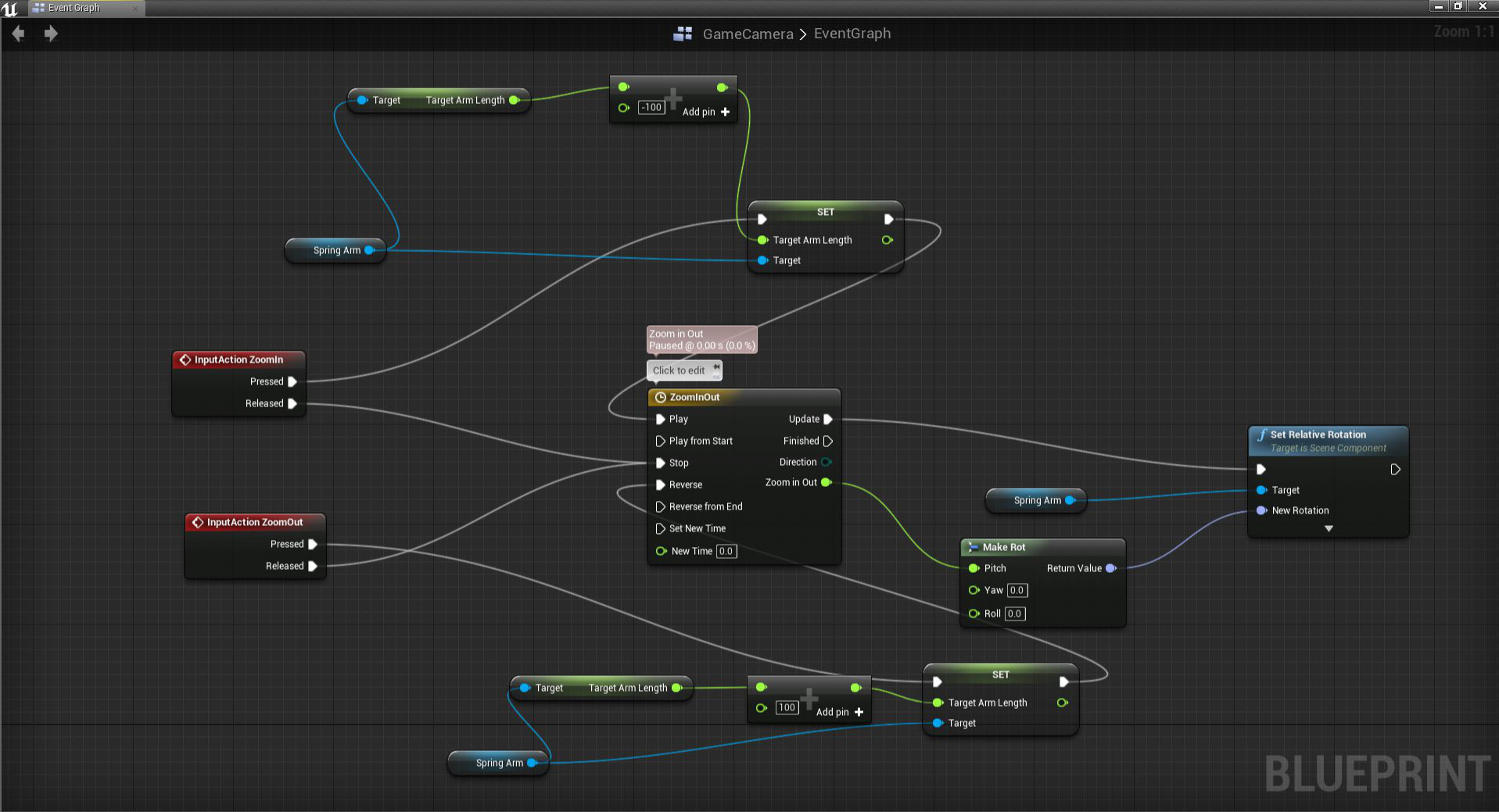
As you can see, once the mouse wheel changes I set the new length for the spring arm and then change the angle with the TimeLine.
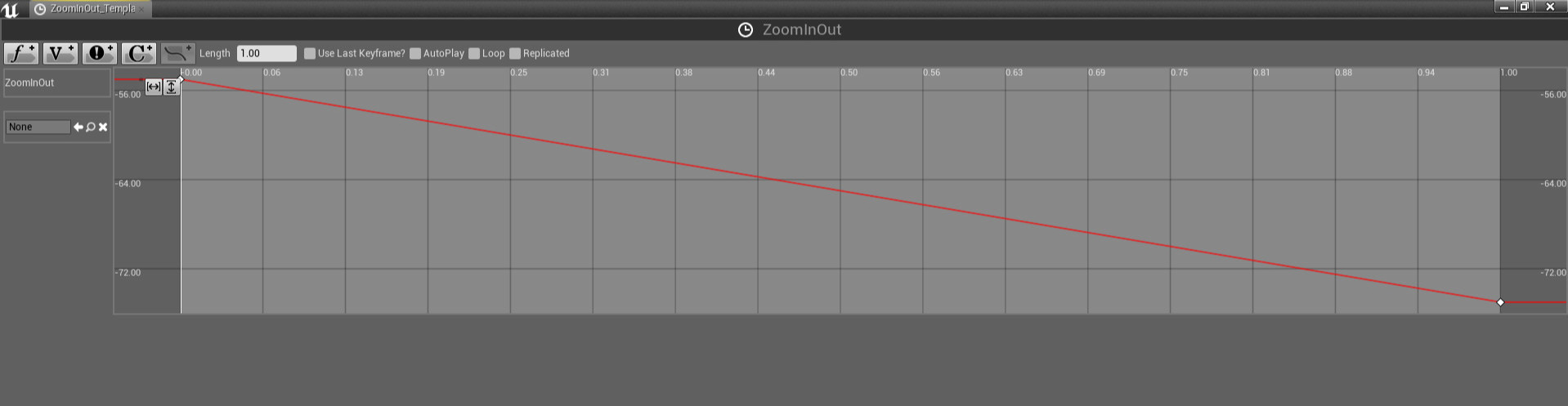
Problem is: When stop is connected, the angle will not change. When the stop is disconnected, it will change to the other end (the Pitch angle varies: -55 degrees>X>-75 degrees). What is the problem preventing me changing the angle per function press?
The inside of the timeline: